
科技改變生活 · 科技引領未來
科技改變生活 · 科技引領未來

談到汽車駕駛盲區解決的問題,估計很多人都會想到360環視,事實上360環視確實很好的解決了駕駛盲區問題。
隨著360環視逐步被市場接受,其背后的相關技術也被扒出來。在網上可以找到各種關于360環視的技術概念、邏輯、原理甚至是算法等。但是很少看到有人把此項“黑科技”的來龍去脈以及未來發展方向說說清道明。
360環視所采用的底層技術是計算機圖像處理技術,此項技術已經在醫學影像領域得到了廣泛的應用,稱為醫學圖像后處理技術,并發展出了一系列成熟、完善的模型、方法。這種技術被廣泛用于輔助觀察、檢測和診斷,典型的應用場景包含IGSN(圖像引導的手術導航)、IGRT(圖像引導的放療)、CAD(計算機輔助診斷)、VE(虛擬內窺鏡)等。
可以這么理解,醫學圖像后處理技術本質上就是計算機圖像處理技術的一個分支,同時由于醫學上對圖像處理結果要求非常嚴格、應用的場景極為復雜,醫學圖像處理技術也推動了計算機圖像處理技術的發展,甚至拓展了計算機圖像處理技術的覆蓋領域。這就把這項技術的應用發揮到了極致。醫學上在整個處理過程中加入了更多技術環節和微觀操作,使得處理效果十分清晰,處理圖像的像素尺度可以達到微米甚至納米級別,還需要對亞像素級別的信息進行處理。而對于車載領域,通常厘米級別的精度就完全可以滿足需求。
目前市場上能夠提供360環視產品的供應商大多數都使用計算機圖像處理技術,只有個別供應商引入了“醫學圖像處理”技術,我們暫且稱之為“計算機流派”和“醫學流派”。
無論是“計算機流派”還是“醫學流派”,都是采用廣角攝像頭獲取圖像,然后對圖像進行預處理、空間映射、融合三個層面處理。不同的是 “醫學流派”在圖像預處理中,除了使用常見的鄰域平均等低通濾波“去噪”方法外,還使用了醫學圖像中對成像探測器量子噪聲進行建模估計的方法,進行深度去噪和圖像增強,這就有利于后期處理效果提升。在空間映射處理過程中,“醫學流派”對特征點的提取更精細,描述更嚴謹,引入高階特征量,對標定點進行領取定位,并進行空間變換矩陣的計算,對于空間變換后的圖像,使用樣條函數進行精細化操作,使得后期融合“空隙”極小化。“醫學流派”在融合處理過程中除了常用的加權平均法之外,還對融合區域色彩特征進行采樣,對融合區域進行偏移量矯正,并將多種方法進行交叉融合處理,最終形成一幅完美的拼接圖像。
相比而言,“醫學流派”對圖像處理的層次更深,更精致,這就導致他們在產品方面與“計算機流派”相比,具有明顯的優勢。主要體現在兩個方面,一個是“靜態拼接”處理的可視化范圍大小和可視化效果上,另一個是“動態拼接”處理的可操作性。
所謂“靜態拼接”處理指的是被拼接物的形體規則,并且保持不變,多個攝像頭的取圖點在保持相對靜止的情況下,持續獲取圖像進行處理。“計算機流派”基本上都屬于“靜態處理”,這就導致他們的產品只能在一體車上安裝。加之在處理過程中存在“偷工減料”的行為,使得處理結果的可視化范圍有很大的限制,處理結果存在瑕疵。因此“計算機流派”產品只能用于乘用車,對于過長的商用車和特殊車輛,經常會出現拼接不起來,可視化界面扭曲,重影等現象。
所謂“動態拼接”處理指的是被拼接物形體會不規則,而且時刻在發生變化,多個攝像頭的取圖點在不斷變化的情況下,持續取獲取圖像進行處理。“這種情況在醫學圖像處理中極為常見,因為人體臟器大多柔軟且形狀一直在變化,彈性、形變、動態模型在醫學圖像處理中的應用比比皆是。這就使得他們的產品能夠在“多廂拖掛式”商用車上安裝。加之在極致的處理過程,使得他們處理結果的可視化范圍不受限制。所以“醫學流派”的產品多用于各類商用車以及特種車輛。
“醫學流派”的“動態處理”究竟是怎么一回事?我們以“鷹駕科技”的拖掛車360環視產品為例進行剖析。
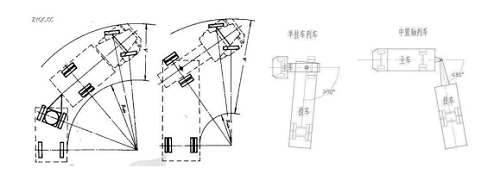
拖掛車由主車(牽引功能)和掛車(承載功能)兩部分構成,中間通過一個 “牽引橋”鏈接在一起。常見的拖掛車有半掛式、全掛式、以及半掛和全掛集連式三種類型。

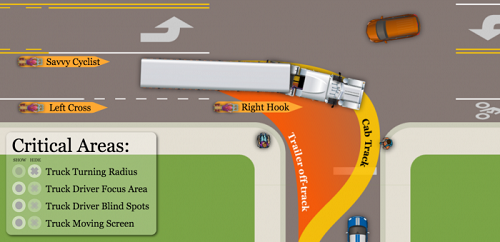
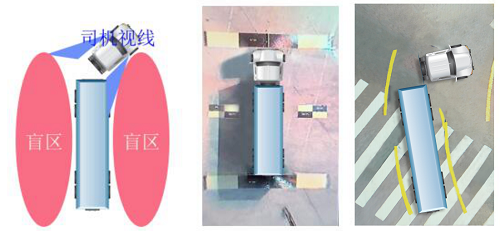
相對于其他商用車,拖掛車的除了車身更長之外,最大的特點是主車和掛車之間的“牽引橋”屬于非剛性鏈接,這就導致在轉彎的時候,車體會隨著彎道以及移動速度不斷發生變化。通常主車和掛車之間的夾角變化范圍最大可以達到正負90°以上,這就使得盲區范圍更大,分布更復雜,且盲區位置和形狀隨著主車和掛車之間的夾角變化而變化。如下圖所示,黃色是牽引車前輪軌跡,對應的橙色部分是掛車軌跡。這個過程中橙色區域就一個超級“死亡月牙”,同時車輛右側后半部分也處于完全性的盲區。
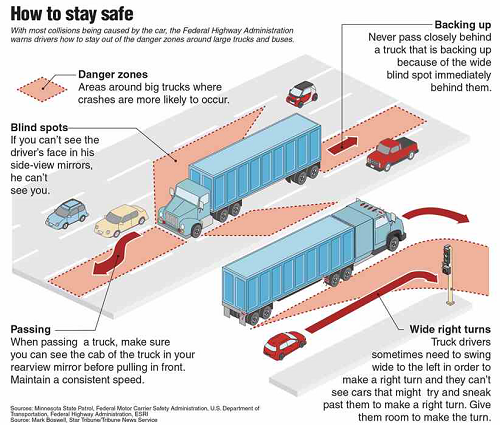
開過拖掛車的駕駛員在駕駛過程中,通常要利用多種方式對車外復雜的盲區進行反復的動態觀測,同時要估計掛車的行駛區域,從而對牽引車進行操控,因此有了“一個彎道一身汗的說法”。
“鷹駕科技”的拖掛車360環視在原有環視方案的基礎上,將攝像頭擴展至6-8路進行分別取像。其中6路用來對拖掛車環視進行取像,另外2路安裝在主車和掛車左右兩側取像,并布置自主研發的轉角傳感器,用來獲取主車和掛車之間的夾角θ。隨著主車和掛車之間夾角的變化,動態調整每個攝像頭負責的成像區域進行處理。這種引入動態參數夾角θ的處理的技術在國內外都屬于首創。
布置在牽引車和掛車上的轉角傳感器和車輛自身轉軸結構無關,從而避免了因不同車輛連接方式不同導致傳感器無法使用。另外,該方案拓展性非常強,對于多級拖掛車輛,只要在每級掛車上以同樣的方式布置轉角傳感器和攝像頭,則可實現多級拖掛車全景系統的拓展。
“鷹駕科技”基于拖掛車全景系統,還實現了拖掛車軌跡計算。雖然車輛行駛軌跡計算在乘用車上已經實現,但對于拖掛車而言,由于其軌跡和多個因素有關,其難度要遠遠大于常規的行駛軌跡線。“鷹駕科技”通過車身CAN通訊獲得車輛方向盤轉角后,采用自主研發的算法計算車輛每一個位置形式軌跡,并在全景視圖中繪制軌跡線。同時對軌跡內的區域通過視頻、雷達等方式進行重點檢測,和精準預警。在轉彎、倒車等若干場景中對司機起到重要的輔助作用,大大降低了駕駛員的操控難度。
鷹駕科技的拖掛車360環視產品不僅完美解決了拖掛車駕駛過程中的盲區問題,同時具備了行車軌跡規劃功能,是商用車駕駛員的福音,更為汽車安全駕駛行業做出了卓越貢獻。
陳楠